Education
Engineers Discover Key Flaw in Space Rover Terrain Testing
When robotic space rovers encounter obstacles on extraterrestrial terrain, they can become immobilized, as demonstrated by the Mars rover Spirit in 2009. Engineers on Earth often intervene to free these vehicles, but a new study by mechanical engineers at the University of Wisconsin–Madison (UW–Madison) reveals a significant flaw in how these rovers are tested before their missions.
The researchers discovered that current testing methods may lead to overly optimistic predictions about a rover’s ability to navigate soft surfaces on celestial bodies, such as the moon or Mars. Their findings, published in the Journal of Field Robotics, underscore the necessity for more accurate simulations to enhance rover mobility.
Uncovering the Testing Flaw
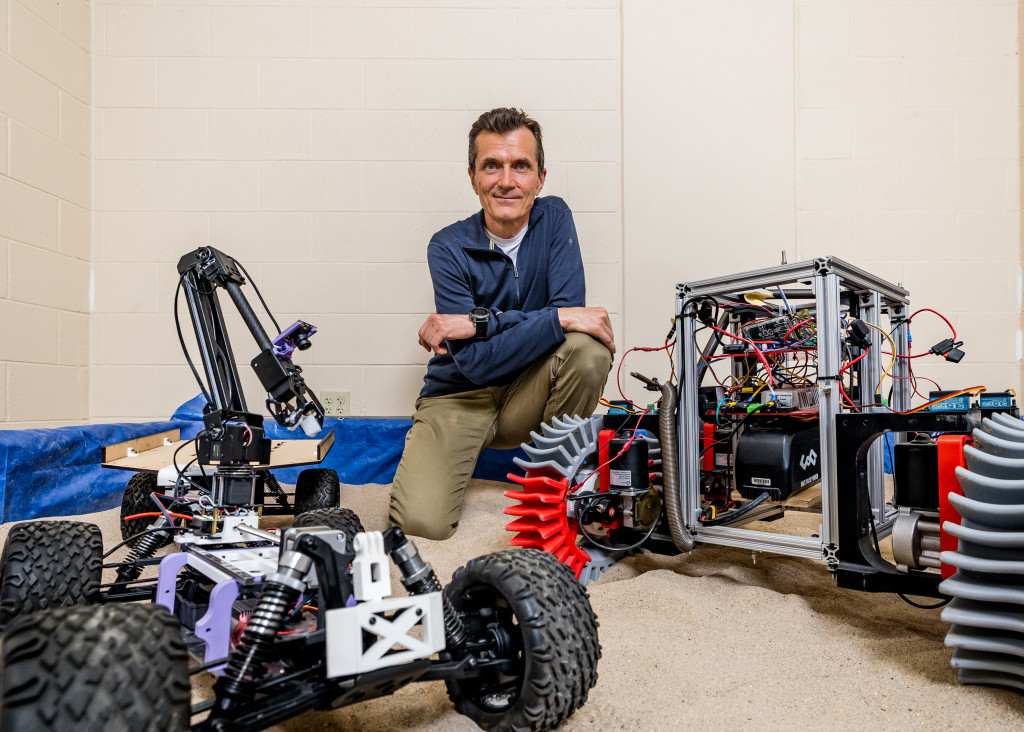
Mechanical engineering professor Dan Negrut and his team utilized computer simulations to analyze the performance of rovers on low-gravity surfaces. Traditionally, engineers have accounted for the moon’s weaker gravitational pull by creating prototypes that weigh one-sixth of the actual rover’s mass. Testing these lightweight models in desert environments was considered sufficient for understanding how they would behave on the moon.
However, Negrut’s research revealed that this approach overlooks a critical detail: the strong influence of Earth’s gravity on sand. On Earth, sand is more compact and supportive compared to the looser, “fluffier” surface found on the moon. This difference means that rovers may experience reduced traction on the moon, increasing the likelihood of becoming stuck in soft terrain.
“In retrospect, the idea is simple: We need to consider not only the gravitational pull on the rover but also the effect of gravity on the sand to get a better picture of how the rover will perform on the moon,” Negrut explained.
Advancements in Simulation Technology
The team conducted their research as part of a NASA-funded project to simulate the VIPER rover, which is intended for a lunar mission. They employed Project Chrono, an open-source physics simulation engine developed at UW–Madison, to model the rover’s interactions with various surfaces.
While simulating the VIPER rover’s movements, the researchers noticed discrepancies between their Earth-based tests and the simulations of its performance on the moon. Further investigation using Project Chrono allowed them to identify the testing flaw that could lead to mission failures.
Negrut emphasized the broader implications of their research, stating, “It’s rewarding that our research is highly relevant in helping to solve many real-world engineering challenges.” The open-source nature of Project Chrono has led to its adoption by numerous organizations, from the aerospace sector to military applications, improving the understanding of complex mechanical systems.
The research has received support from organizations including the National Science Foundation and the U.S. Army Research Office, reflecting its significance in advancing both space exploration and terrestrial engineering.
Negrut highlighted the rarity of producing industrial-strength software from an academic setting, noting, “There are certain types of applications relevant to NASA and planetary exploration where our simulator can solve problems that no other tool can solve.”
As the team continues to innovate and enhance Project Chrono, they aim to keep pace with emerging challenges in both space and Earth-based applications. Their work stands as a testament to the importance of rigorous testing and simulation in ensuring the success of future extraterrestrial missions.










Revolutionary Photonic Ski-Jump Could Miniaturize LiDAR Systems

Couples Detox from Plastics in New Netflix Doc: Can It Boost Fertility?

Aventon Launches Affordable Full-Suspension Electric Mountain Bike

Discover Eight Must-Try Restaurants This Spring Season

UC Irvine Team Unveils Innovative Ion Pump for Water Treatment

One-Third of Americans Trim Daily Expenses for Healthcare Needs

Apple Secures First Oscar in Three Years with F1: The Movie

Fourth Graders Celebrate St. Patrick’s Day with Creative Weather Drawings

Kim Kardashian Dazzles at Vanity Fair Oscars Party 2026

Nostradamus’ 2026 Predictions: Star Death and Dark Events Loom

Breakthroughs and Challenges Await Science in 2026

OpenAI to Implement Age Verification for ChatGPT by December 2025

Electric Moto Influencer Surronster Arrested in Tijuana

Discover the Top 10 Calorie Counting Apps of 2025

Bella Hadid Shares Health Update After Treatment for Lyme Disease

Analysts Project Stronger Growth for Apple’s iPhone 17 Lineup

Top 10 Penny Stocks to Watch in 2026 for Strong Returns

Japanese Study Finds Rose Oil Can Increase Brain Gray Matter
-
 Science3 months ago
Science3 months agoNostradamus’ 2026 Predictions: Star Death and Dark Events Loom
-
 Science3 months ago
Science3 months agoBreakthroughs and Challenges Await Science in 2026
-
 Technology4 months ago
Technology4 months agoOpenAI to Implement Age Verification for ChatGPT by December 2025
-
 Technology6 months ago
Technology6 months agoElectric Moto Influencer Surronster Arrested in Tijuana
-
 Technology8 months ago
Technology8 months agoDiscover the Top 10 Calorie Counting Apps of 2025
-
 Health6 months ago
Health6 months agoBella Hadid Shares Health Update After Treatment for Lyme Disease
-
 Health7 months ago
Health7 months agoAnalysts Project Stronger Growth for Apple’s iPhone 17 Lineup
-
 Technology3 months ago
Technology3 months agoTop 10 Penny Stocks to Watch in 2026 for Strong Returns
-
 Health7 months ago
Health7 months agoJapanese Study Finds Rose Oil Can Increase Brain Gray Matter
-

 Science5 months ago
Science5 months agoStarship V3 Set for 2026 Launch After Successful Final Test of Version 2
-
 Education7 months ago
Education7 months agoHarvard Secures Court Victory Over Federal Funding Cuts
-

 Technology4 weeks ago
Technology4 weeks agoNvidia GTC 2026: Major Announcements Expected for AI and Hardware